KJ-DR120MR, KJ-DR140MR, KJ-DR180MR, KJ-DR200MR, KJ-DR250MR, KJ-DR300MR

제품사양
| DESCRIPTION | UNIT | KJ-DR120MR | KJ-DR140MR | KJ-DR180MR | KJ-DR200MR | KJ-DR250MR | KJ-DR300MR |
|---|---|---|---|---|---|---|---|
| 가공탱크치수 (Work tank dimensions) |
mm | 2000X1200X600 | 2400X1340X700 | 3100X1700X700 | 3500X1800X700 | 3800X1800X700 | 4500X1800X700 |
| 작업대 치수 (Work table dimensions) |
mm | 1200X600 | 1500X800 | 2000X1000 | 2500X1200 | 2700X1200 | 3500X1200 |
| 주축(Z)축 높이 (Distance Between Main Axis To Table) |
mm | 330/730 | 500/950 | 600/1200 | 600/1200 | 600/1200 | 600/1200 |
| 이송거리(X * y * Z1+Z) (Stoke length) |
mm | 600(2)X500X400 | 850(2)X700X450 | 1200(2)X800X600 | 1400(2)X800X600 | 1800(2)X900X600 | 2600(2)X900X600 |
| 가공물 최대 중량 (Max. weight of work piece) |
kgs | 3000 | 4500 | 7000 | 8500 | 10000 | 15000 |
| 전극 최대 중량 (Max. weight of electrade) |
kgs | 200 | 150 | 200 | 200 | 200 | 200 |
| 가공액 탱크 용량 (Dielectric oil tank capacity) |
Liters | 1500 | 2400 | 4500 | 5000 | 5400 | 6000 |
| 최소 전극 소모비 (Min. Wear Rate) |
% | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 | 0.1 |
| 최대 면조도 (Best surface roughness) |
㎛ | 0.2 | 0.2 | 0.2 | 0.2 | 0.2 | 0.2 |
| 최대 가공 전류 (Woking current) |
A | 50 | 50 | 50 | 50 | 50 | 50 |
| 최대 소비 전력 (Power cowumption) |
KVA | 14 | 14 | 14 | 14 | 14 | 14 |
| 기계 중량 (Weight of machine) |
kgs | 8800 | 15600 | 15600 | 18000 | 21000 | 26000 |
| 기계 설치 사양 (Machine L*W*H) |
mm | 3700X3700X2900 | 4600X3900X3200 | 4800X4200X3860 | 5300X5000X3860 | 5600X5200X3860 | 6200X5300X3860 |
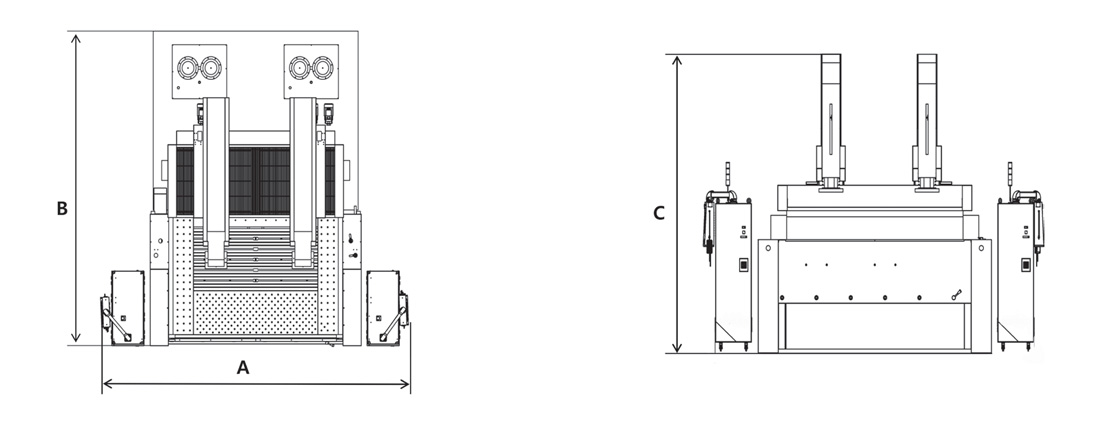
설치사양(Installation Specifications)
| 모델명 | A | B | C |
|---|---|---|---|
| KJ-DR120MR | 3700 | 3700 | 2500 |
| KJ-DR140MR | 4600 | 3900 | 3200 |
| KJ-DR180MR | 4800 | 4200 | 3860 |
| KJ-DR200MR | 5300 | 5000 | 3860 |
| KJ-DR250MR | 5600 | 5200 | 3860 |
| KJ-DR300MR | 6200 | 5300 | 3860 |
설치도면
특징
· 본기계는 3축 컬럼이송방식으로 최고급의 초정밀 LM-Guides와 Ball-Screw 사용하여 장기간 사용시에도 변형이 없는 고정밀도를 유지
· 흑연가공회로, 프로그램 및 경면 가공 특수 회로 내장
· 3AXES 고정도 고강도 고정밀 Ball Screw 사용
· 3축이 동시에 움직임과 측면 방전 가공 기능
· XY, YZ, ZX 평면 요동 가공 기능
· 60개의 가공 좌표
· 원형과 사각형 그리고 다양한 요동패턴 가공
· 자동셋팅 및 가공 위치 이송 기능
· 프로그램 보상 편집 기능
· G코드 사용으로 다양한 편집 가능
· MPG리모콘을 사용한 X, Y, Z축 이송이 편리
· 조작이 간편한 17인치 LED 대화형 터치스크린 디스플레이
· 윈도우OS로 USB를 사용한 데이터 입출력 가능
· 도움말을 사용한 자세한 기능 설명
· 산업용 제어시스템으로(조도, 면적, 가공깊이, Over-Cut) 간단한 대화식 입력 가공 프로그램
· 화재방지 센서, 액면감지 회로 내장
· 고속 High-Speed Jumping 및 2단 Jumping 기능
- 회사소개
- 제품소개
- 소모품/치공구
- 중고매매
- 시스템/가공샘플
- 고객센터